Me and my Legway
Originally published April 18 2006
(This was originally published here in January 2006) Two years ago Steve Hassenplug created a two-wheeled self-balancing robot using the Lego Mindstorms Robotics Invention System 2 and a pair of special sensors manufactured by HiTechnic. It was the same Lego Mindstorms that I had purchased that previous Christmas. Unfortunately when I finally found out about Steve's work it was nearly a year later, and a key component of his Legway, the HiTechnic EPOD Sensor, was no longer being made. Jump forward to November 2005, and I find out that HiTechnic is again building and selling the sensors, so I immediately ordered two for myself.
While waiting for the sensors to arrive, I started to look at the other bits needed to build the Legway. Two years is an eternity in computing. Key software and support systems had evolved since the original Legway was produced. Elements of the Legway that had changed and needed to be updated were:

Legway lying on its side exposing the HiTechnic sensors. You can see them above each wheel.

Legway up and dancing around the desktop. The sensors are the gray blocks at the bottom with the wires coming out of their tops.

The RS232 tower connected to the Dynex USB adapter. I picked mine up at a local Best Buy.
(This was originally published here in January 2006) Two years ago Steve Hassenplug created a two-wheeled self-balancing robot using the Lego Mindstorms Robotics Invention System 2 and a pair of special sensors manufactured by HiTechnic. It was the same Lego Mindstorms that I had purchased that previous Christmas. Unfortunately when I finally found out about Steve's work it was nearly a year later, and a key component of his Legway, the HiTechnic EPOD Sensor, was no longer being made. Jump forward to November 2005, and I find out that HiTechnic is again building and selling the sensors, so I immediately ordered two for myself.
While waiting for the sensors to arrive, I started to look at the other bits needed to build the Legway. Two years is an eternity in computing. Key software and support systems had evolved since the original Legway was produced. Elements of the Legway that had changed and needed to be updated were:
- I used the Linux environment on my Gateway to build and use the BrickOS software. When I attempted to put the software environment together I noticed the original tool chain used gcc 2.95. When I went looking for more up-to-date tools, I only found them for Linux. I followed Matthias Ehmann's directions for installing and building the BrickOS build environment under Linux. Let me emphasize that you use exactly what is called for in the directions. I tried gcc 3.4.5 with matching binutils. Using gcc 4.0.2 to build the gcc 3.4.5-based cross-compiler generated an ICE under 4.0.2. Gcc 3.4.3 successful builds as a cross-compiler under gcc 4.0.2.
- The Lego Mindstorms I/R tower. The tower originally connected to a personal computer via to a nine-pin RS232 serial port. The system I used to program my RCX 1.0 brick was a Gateway notebook that did not have any serial ports. Instead, the Gateway has four USB 2.0 ports (eight connected to the dock), so I used a Dynex USB-to-RS232 adapter to communicate with the tower. This worked out very well under Linux, as the device showed up as /dev/ttyUSB0.
- The original legway.c program from Steve's site was written for an earlier version of BrickOS. One change in particular has to be made to the code for it to compile and work properly with the current BrickOS: replace sys_time with long sys_time = get_system_up_time();

Legway lying on its side exposing the HiTechnic sensors. You can see them above each wheel.
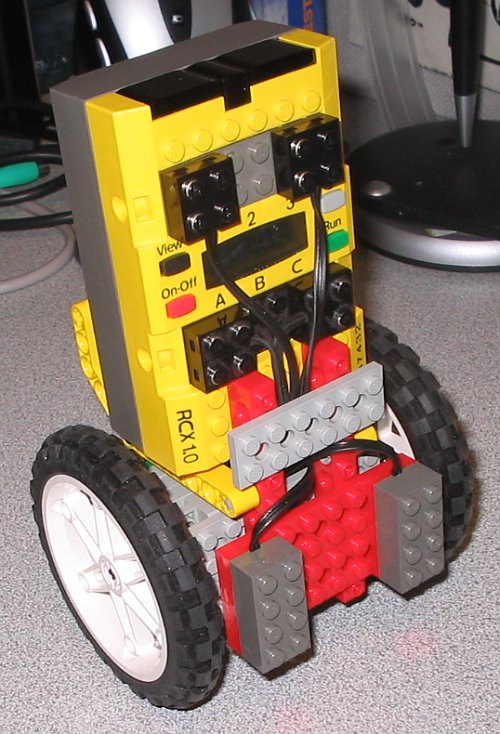
Legway up and dancing around the desktop. The sensors are the gray blocks at the bottom with the wires coming out of their tops.
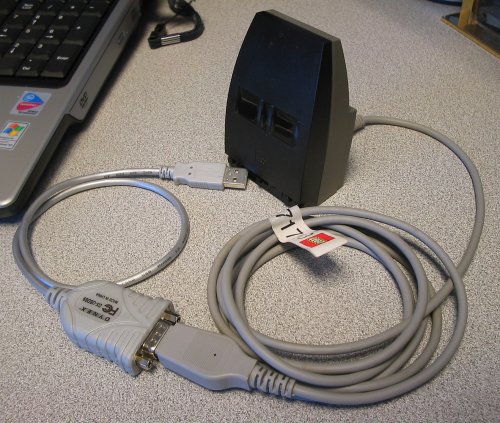
The RS232 tower connected to the Dynex USB adapter. I picked mine up at a local Best Buy.


Comments
Post a Comment
All comments are checked. Comment SPAM will be blocked and deleted.