Building a tracked square-bot
Originally published October 22, 2006
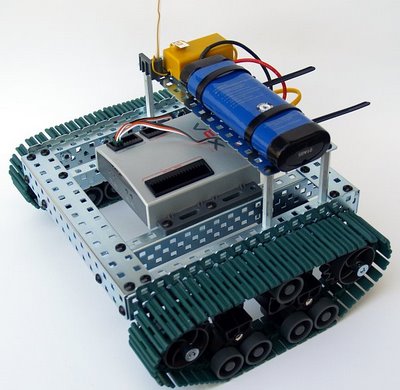
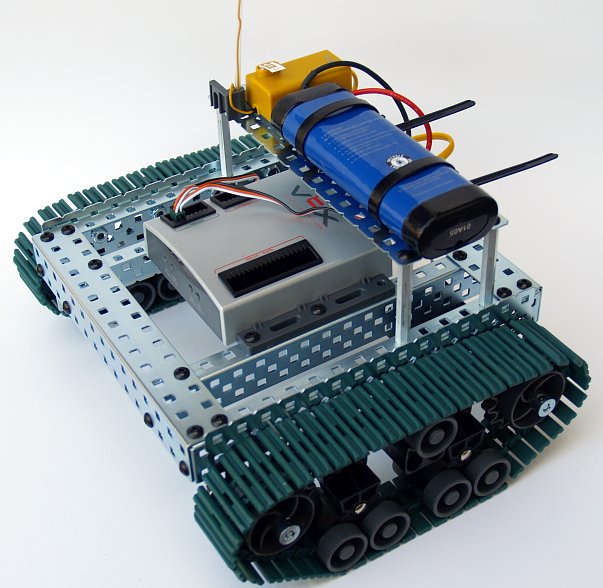
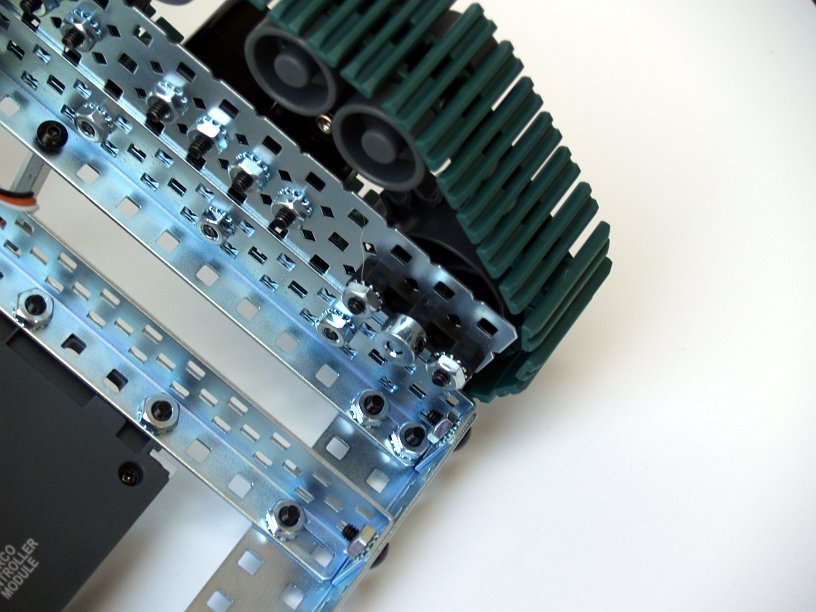
As mentioned previously I found a lot of the Vex hardware on sale during the summer. One of the supplemental kits I picked up was for tracks. The track kit comes with bogies, drive wheels, linked treads, and hardware (screws and lock nuts) to build two sets of treads. The following photo shows a completed square bot frame with the treads on the sides in place of wheels.
The directions are fine for placing the drive wheels and bogies, but the method for firmly attaching the drive wheels to the bulkhead and to the drive motors is only lightly covered. If you follow the directions the driver wheels (the sprocketed wheels at both ends of the tread) won't stay on. Instead you have to come up with better assemblies at both ends.
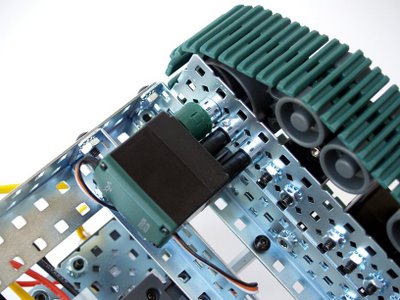
The following image shows how I used three collars to hold space a drive motor as well as keep the drive shaft in place. Two of the three collars had their tightening screws removed; they weren't needed. Those collars are used to space the motor away from the side rail, and two of the longest 6/32 screws are used to assemble the motors through the collars onto the rail. The third collar keeps its screw, and is used to hold the drive shaft in place once the shaft is pushed into the motor's clutch.
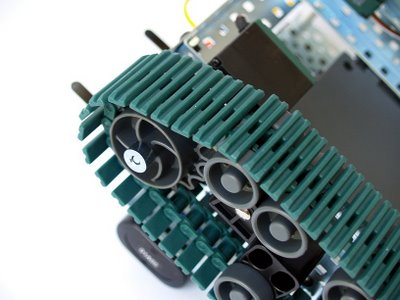
The front idler has a similar construction, with a plastic bushing used to help hold the axle in place without wobbling. What's not shown is that on the other side of the metal bulkhead, both wheels have four washers and a short plastic spacer (the 0.182 incher) between the sprocketed wheel and the bulkhead; the washers are against the metal, and the spacer is against the wheel.

To keep the sprocketed wheel firmly in place, collars were added to all the outside of all four sprocketed wheels.
Setting up the transmitter for tracked control
Unlike the wheeled square bot, the motors are directly connected to the treads. In order to use the transmitter controller with the treaded square bot the way you use it with the wheeled square bot, you need to configure the transmitter. I configured mine by selecting configuration (see page F-2) #2, and then reversed the direction of motors (channels) 2 and 3 (see page F-5 for details). I now have two configurations; 1 for wheeled and 2 for tracked. I select the configuration and then just use the sticks.
As mentioned previously I found a lot of the Vex hardware on sale during the summer. One of the supplemental kits I picked up was for tracks. The track kit comes with bogies, drive wheels, linked treads, and hardware (screws and lock nuts) to build two sets of treads. The following photo shows a completed square bot frame with the treads on the sides in place of wheels.
The directions are fine for placing the drive wheels and bogies, but the method for firmly attaching the drive wheels to the bulkhead and to the drive motors is only lightly covered. If you follow the directions the driver wheels (the sprocketed wheels at both ends of the tread) won't stay on. Instead you have to come up with better assemblies at both ends.
The following image shows how I used three collars to hold space a drive motor as well as keep the drive shaft in place. Two of the three collars had their tightening screws removed; they weren't needed. Those collars are used to space the motor away from the side rail, and two of the longest 6/32 screws are used to assemble the motors through the collars onto the rail. The third collar keeps its screw, and is used to hold the drive shaft in place once the shaft is pushed into the motor's clutch.

The front idler has a similar construction, with a plastic bushing used to help hold the axle in place without wobbling. What's not shown is that on the other side of the metal bulkhead, both wheels have four washers and a short plastic spacer (the 0.182 incher) between the sprocketed wheel and the bulkhead; the washers are against the metal, and the spacer is against the wheel.
To keep the sprocketed wheel firmly in place, collars were added to all the outside of all four sprocketed wheels.

Setting up the transmitter for tracked control
Unlike the wheeled square bot, the motors are directly connected to the treads. In order to use the transmitter controller with the treaded square bot the way you use it with the wheeled square bot, you need to configure the transmitter. I configured mine by selecting configuration (see page F-2) #2, and then reversed the direction of motors (channels) 2 and 3 (see page F-5 for details). I now have two configurations; 1 for wheeled and 2 for tracked. I select the configuration and then just use the sticks.


Comments
Post a Comment
All comments are checked. Comment SPAM will be blocked and deleted.