The NXT Generation - Lego Upgrades Mindstorms
 I've played with Legos for a long time, and I've played with the Lego Mindstorms Robot Invention System (RIS) V1 for nearly three years. It figures that right about the time I find the parts to build my own Legway that Lego announces its next generation robot kit, the NXT.
I've played with Legos for a long time, and I've played with the Lego Mindstorms Robot Invention System (RIS) V1 for nearly three years. It figures that right about the time I find the parts to build my own Legway that Lego announces its next generation robot kit, the NXT.First shown at this years CES in Las Vegas, the Lego NXT is interesting in that it appears Lego is taking the lessons it learned with the original Mindstorms to create a new robot kit that offers greater end-user satisfaction. There was a TechUser article about Lego Mindstorms (Lego Mindstorms: What Went Wrong?) that attempted to analyze why the first RIS "failed". The article is interesting because there is a link to a very good response from a reader (Andy Toone) who makes a number of alternate points as to why the original RIS has not been successful. I quote parts of the message below.
I can think of another explanation for the problems with Mindstorms sets - the average user experience is not actually as compelling as you'd think... However, the average user has just spent two hundred bucks on a kit and may be disappointed to discover that (a) programming is not as easy as they thought and (b) with only a limited number of motors and sensors, getting the RIS to do something interesting requires an above average level of ingenuity...
Combine software and hardware and the problem is huge. Mindstorm owners must be able to set up their PC, understand programming to some extent, understand the concept of downloading and independent program execution, build models that use a number of mechanical principles to do something effective, and manage a limited number of components to create those models. Before all this can come into play, they must have the imagination, skill and judgment to come up with a project that is suitable to the tools they have to hand. Mindstorms certainly rewards ingenuity, but sadly it demands ingenuity as well.
So, my suggestion is that the average user finds they have spent as much as they would on a games console - but rather than limitless possibilities and a wide variety of pre-packaged experiences, they discover that they are very reliant on Lego to give them further instruction and that even with investment in additional kits, their experience doesn't become significantly deeper. The Mindstorm kit gets put away and having bought in at the pinnacle of the technology, they are unwilling or unlikely to buy other Lego items.
Lego themselves must also be aware that with limited sensors and actuators, the variety of robots they can offer to the user is not as great as they'd like. If you examine the hobby robotics scene on the internet, you'll swiftly discover that if you discount robots that use very sophisticated hardware and/or software, you are limited to relatively simplistic behavior. Without additional specialized components (which FischerTechnik benefits from), Mindstorms kits rarely go beyond the 'programmable buggy' model.
 A lot of what Andy writes about resonates with my experiences, especially the part about specialized components. It took HiTechnic's EPOD sensor to build the interesting Legway, as well as adding the BrickOS firmware and gnu toolchain to program the Legway to use the sensors and provide the necessary behaviors. This is far and above the basic capabilities of the vanilla RIS.
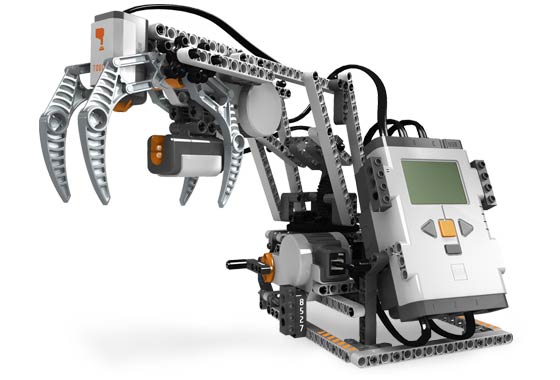
A lot of what Andy writes about resonates with my experiences, especially the part about specialized components. It took HiTechnic's EPOD sensor to build the interesting Legway, as well as adding the BrickOS firmware and gnu toolchain to program the Legway to use the sensors and provide the necessary behaviors. This is far and above the basic capabilities of the vanilla RIS.It appears that NXT attempts to address these issues, and perhaps a little more. For example, the NXT Intelligent Brick has a 32-bit processor, more memory, and flash. This immediately brings to mind an ARM-based systems along the lines of the Gumstix. Gumstix sells a $99 board no bigger than a stick of chewing gum with a 200MHz XScale ARM processor, 64MB of RAM, and 4MB of flash. It runs Linux. If the NXT Intelligent Brick does indeed have an ARM with sufficient RAM and FLASH (especially at today's low costs for all components) and if Lego supports the enthusiast community they way they did with the RIS, then the possibilities for writing good sophisticated software are very good.
And there are the new sensors being added to the NXT: rotational sensors on the motors (shaft position encoding), a simple sound sensor, a sonar positional sensor, enhanced touch sensors, and enhanced light sensors that sound a lot like what the HiTechnic sensors provide. Throw in USB (for programming I'm sure) and Bluetooth (for wireless programming or control from a PDA or cellphone) and you have the potential for a very interesting robotics kit that provides considerably more features and capabilities to build with. I could go on repeating what's already been written here by Lego, but I'll leave it to you to follow the link and read on.
Don't get me wrong. I was, and continue to be very happy with the RIS. I've cobbled together quite a few 'inventions' from the original kit. But it took the gnu toolchain to really get under the hood and take the next interesting steps, and if HiTechnics hadn't stopped making its Lego sensors for a few years, I'd have taken it even further. 2006 is shaping up to be a very exciting year for the robotics hobbyist, especially for me. New kits with sophisticated actuators, sensors, and components from companies such as Lego, Vex, and Robotis are being released. Even HiTechnic is back in business, getting ready to release new versions of its Lego sensors for the NXT. I believe that this year, more than any other, will be the tipping point for inexpensive, affordable general robotics experimentation in much the same way that 1975 was a tipping point for personal computers. It's already started with me using Gumstix and Vex, and it will continue with Lego NXT. With all that I see coming, it's going to be an exciting next few years, if not decades.
Other Sites of Interest
There's another blog, nxtbot.com, where the author traveled to CES and covered the Lego NXT, among other interesting devices. The two articles on his site cover the software programming environment, which appears far more flexible and sophisticated than the RIS' original system.


Comments
Post a Comment
All comments are checked. Comment SPAM will be blocked and deleted.