Minor mechanical tweaks to the Vex squarebot
Originally published April 18, 2006
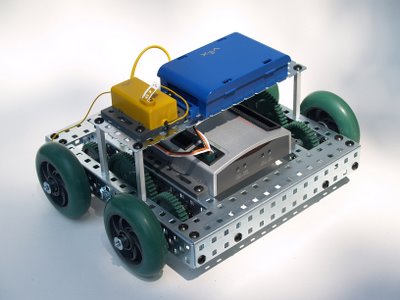
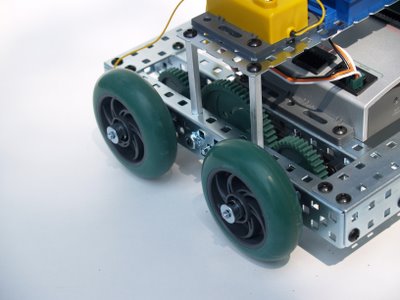
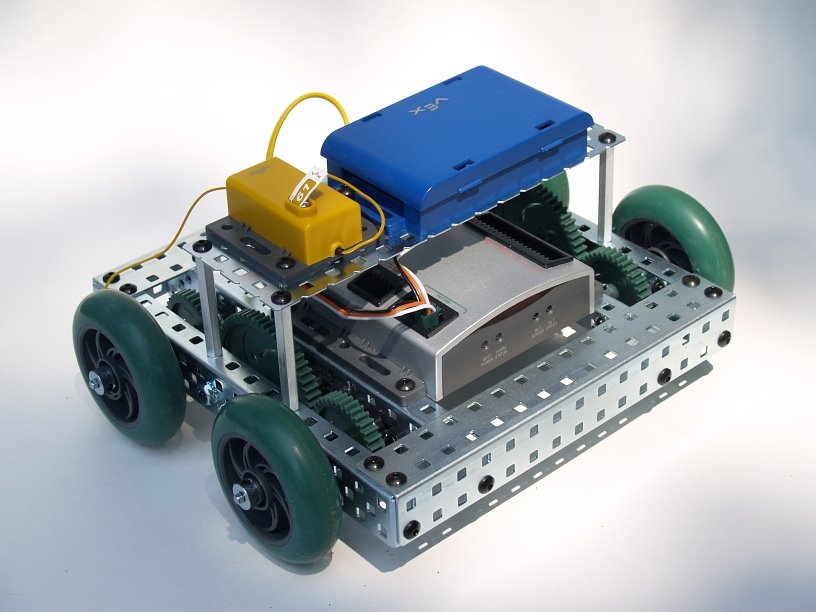
Section 2 of the Vex Inventor's Guide shows how to build a sample motorized chassis they call squarebot. There's some additional mechanical tweaks that need to be made to squarebot in order to make him a little more rugged. First of all, you should add a collar to the outside of each of the four wheels. This keeps them from coming off while the squarebot is rolling around for extended periods. See the two photos below. The first is an overall view and the one beneath is a closeup of two of the wheels with the collars.
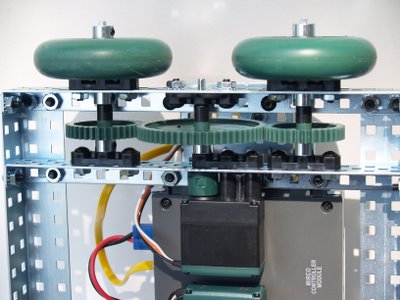
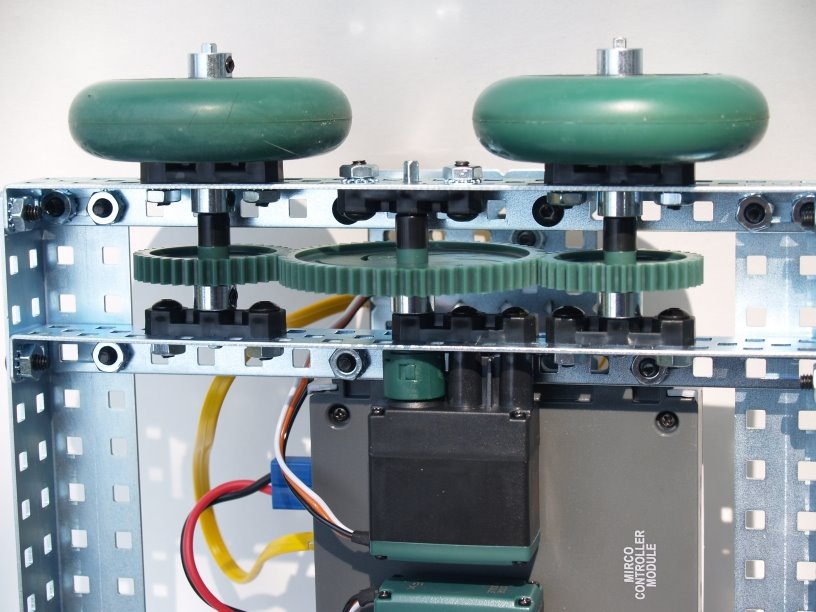
Next, you need to add spacers to the inside of the chassis subassembly holding the gears, between the outside of each gear and the outer chassis rail. It is annoying to be driving along and then have squarebot stop because the gears have slipped along the axles and no longer engage. The following picture shows the added plastic spacers, looking up from the bottom of the squarebot. They are the black shiny pieces between the green gears and the upper-most chassis rail.
I got these spacers as part of a Vex spare parts kit at a local Radio Shack after they cut the price for the spares kit in half. Why the spacers weren't a part of the $300 Vex Robotics Design Kit is beyond me, but they sure came in handy with the squarebot. Now everything runs fine for as long as I need.
Section 2 of the Vex Inventor's Guide shows how to build a sample motorized chassis they call squarebot. There's some additional mechanical tweaks that need to be made to squarebot in order to make him a little more rugged. First of all, you should add a collar to the outside of each of the four wheels. This keeps them from coming off while the squarebot is rolling around for extended periods. See the two photos below. The first is an overall view and the one beneath is a closeup of two of the wheels with the collars.

Next, you need to add spacers to the inside of the chassis subassembly holding the gears, between the outside of each gear and the outer chassis rail. It is annoying to be driving along and then have squarebot stop because the gears have slipped along the axles and no longer engage. The following picture shows the added plastic spacers, looking up from the bottom of the squarebot. They are the black shiny pieces between the green gears and the upper-most chassis rail.
I got these spacers as part of a Vex spare parts kit at a local Radio Shack after they cut the price for the spares kit in half. Why the spacers weren't a part of the $300 Vex Robotics Design Kit is beyond me, but they sure came in handy with the squarebot. Now everything runs fine for as long as I need.


Comments
Post a Comment
All comments are checked. Comment SPAM will be blocked and deleted.